#include<myhead.h>
#define SER_IP "192.168.125.242"
#define SER_PORT 1234
#define CLI_IP "192.168.243.131"
#define CLI_PORT 9999int main(int argc, const char *argv[])
{
//1、创建用于通信的套接字文件描述符
int cfd = socket(AF_INET, SOCK_STREAM, 0);
if(cfd == -1)
{
perror("socket error");
return -1;
}
printf("socket success cfd = %d\n", cfd); //3//设置端口号快速重用
int reuse = 1;
if(setsockopt(cfd, SOL_SOCKET, SO_REUSEADDR, &reuse, sizeof(reuse))==-1)
{
perror("setsockopt error");
return -1;
}
printf("端口号快速重用成功\n");//2、绑定IP和端口号
//对于客户端而言,如果没有绑定IP地址和端口号
//那么系统回默认将当前ip地址与一个随机的端口号进行绑定
//如果客户端绑定了端口号,那么使用的就是自己绑定的
//2.1 填充地址信息结构体
struct sockaddr_in cin;
cin.sin_family = AF_INET; //协议族
cin.sin_port = htons(CLI_PORT); //客户端端口号
cin.sin_addr.s_addr = inet_addr(CLI_IP); //客户端ip地址//2.2 绑定工作
if(bind(cfd, (struct sockaddr*)&cin, sizeof(cin)) == -1)
{
perror("bind error");
return -1;
}
printf("bind success\n");
//3、连接服务器
//3.1 填充要连接的服务器地址信息结构体
struct sockaddr_in sin;
sin.sin_family = AF_INET; //协议族
sin.sin_port = htons(SER_PORT); //服务器端口号
sin.sin_addr.s_addr = inet_addr(SER_IP);//服务器IP//3.2 连接服务器
if(connect(cfd, (struct sockaddr*)&sin, sizeof(sin))==-1)
{
perror("connect error");
return -1;
}
printf("connect success\n");//4、数据收发
char hbuf[5] = {0xff, 0x02, 0x00,0x5A, 0xff};
unsigned char lbuf[5] = {0xff, 0x02, 0x01, 0x00, 0xff};send(cfd, hbuf, sizeof(hbuf), 0); //初始化红色臂展
send(cfd, lbuf, sizeof(lbuf), 0); //初始化蓝色臂展char rbuf[2]="";
while(1)
{
printf("******************************\n");
printf("******w红色臂角度增加*********\n");
printf("******s红色臂角度减小*********\n");
printf("******d蓝色臂角度增加*********\n");
printf("******a红色臂角度减小*********\n");
printf("******请输入》》》》*********\n");
bzero(rbuf,sizeof(rbuf));
fgets(rbuf,sizeof(rbuf),stdin);
getchar();
rbuf[2]=0;//加个输入字符的判断,不正确则重新输出
if(strcmp(rbuf,"w")==0)
{
hbuf[3]-=0x05;//加个判断
send(cfd, hbuf, sizeof(hbuf), 0); //初始化红色臂展
}
if(strcmp(rbuf,"s")==0)
{
hbuf[3]+=0x05;//加个超出判断
send(cfd, hbuf, sizeof(hbuf), 0); //初始化红色臂展
}
if(strcmp(rbuf,"d")==0)
{lbuf[3]+=0x05;
//加个判断
send(cfd, lbuf, sizeof(lbuf), 0); //初始化蓝色臂展
}
if(strcmp(rbuf,"a")==0)
{
lbuf[3]-=0x05;//加个判断
send(cfd, lbuf, sizeof(lbuf), 0); //初始化蓝色臂展
}
}
//5、关闭套接字
close(cfd);
return 0;
}
TCP机械臂测试
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.mfbz.cn/a/556854.html
如若内容造成侵权/违法违规/事实不符,请联系我们进行投诉反馈qq邮箱809451989@qq.com,一经查实,立即删除!相关文章
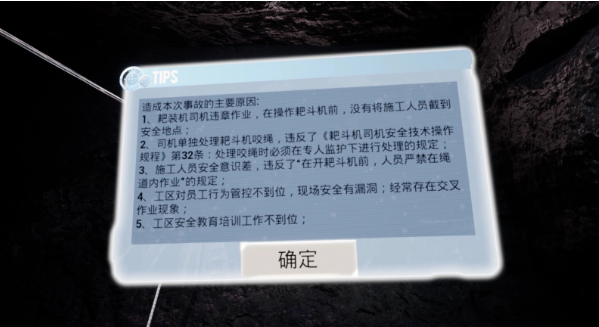
搜维尔科技:【工业仿真】煤矿机械安全事故VR警示教育系统
产品概述 搜维尔科技
煤矿机械安全事故VR警示教育系统 系统内容:
系统采用虚拟现实技术模拟矿井井下机械安全技术及事故,展现井下常见机械伤害事故,表现伤害事故的隐患点,能够模拟事故发生和发展过程;营造井下灾害发…

创业之路:专注与腾挪的艺术
在创业的道路上,每一个创业者都面临着无数的挑战和选择。著名投资人吴世春曾言:“树挪死,人挪活;顺利时学会专注,一旦不顺时学会腾挪。”这句话道出了创业过程中专注与腾挪的重要性,也为创业者们指明了方向…
C语言 选择控制结构(1) 了解选择结构 关系运算符讲解 基本逻辑判断演示
接下来 我们来说 选择控制结构 在生活中 我们也有很多需要分支结构的例子 比如: 计算两个整数的最大值 计算n个数的最大值,最小值 判断三角形三边能否构成三角形? 判断某年是否是闰年? 判断输入的英文字母是大写还是小写?
我们在程序开发中 需要根据某种条件 进…
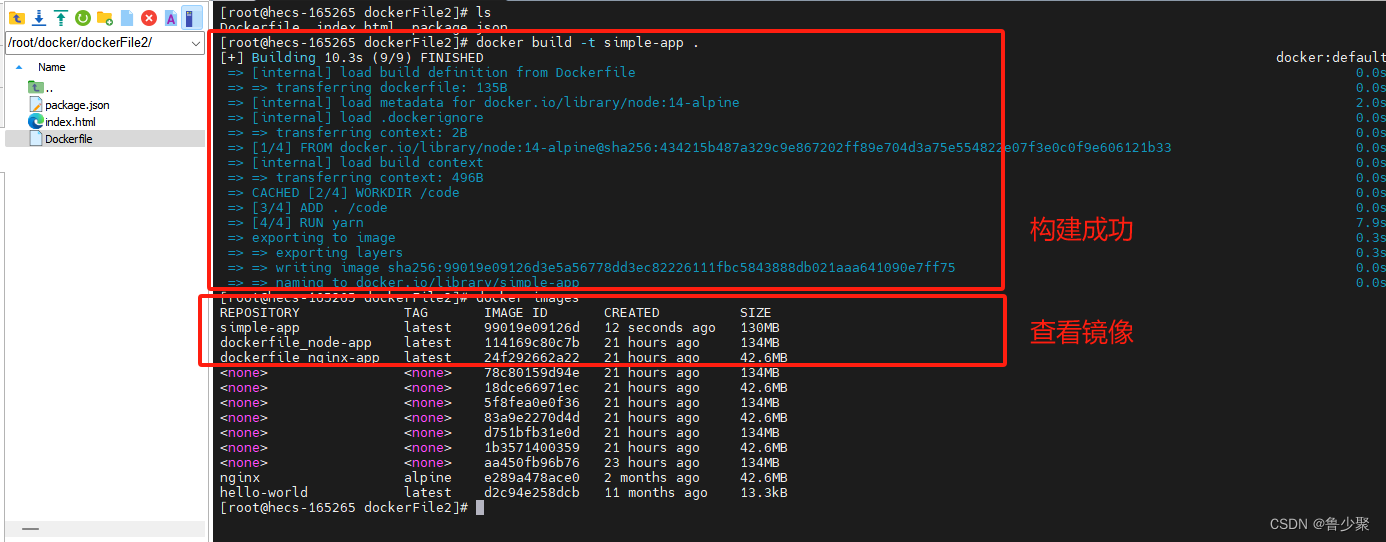
Docker(二)Docker+ server部署极简前端页面
本篇文章介绍如何使用 Dockerserver 将一个极简前端页面进行部署
1.本地运行一个简单的前端页面,再把它部署到服务器上
index.html
<!DOCTYPE html>
<html lang"en">
<head><meta charset"UTF-8"><meta name&quo…
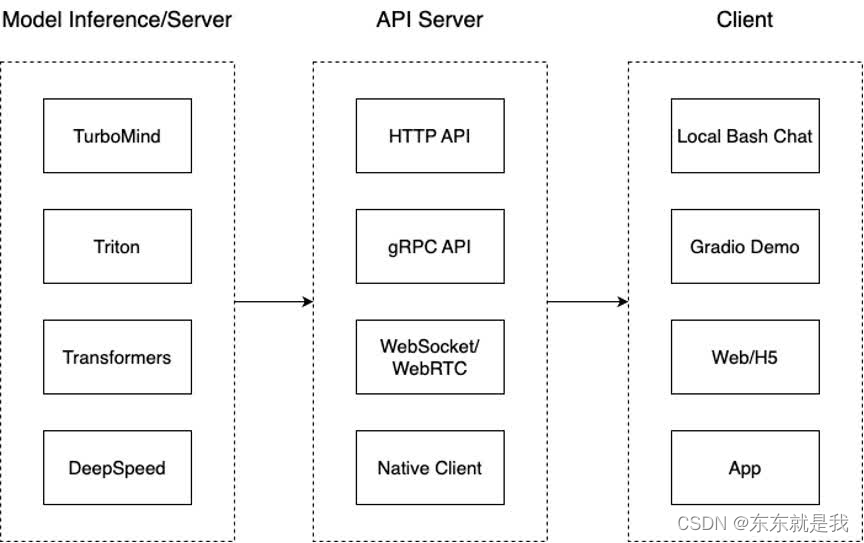
书生·浦语大模型第二期实战营(5)笔记
大模型部署简介 难点 大模型部署的方法 LMDeploy 实践
安装
studio-conda -t lmdeploy -o pytorch-2.1.2conda activate lmdeploypip install lmdeploy[all]0.3.0模型
ls /root/share/new_models/Shanghai_AI_Laboratory/ln -s /root/share/new_models/Shanghai_AI_Laborato…
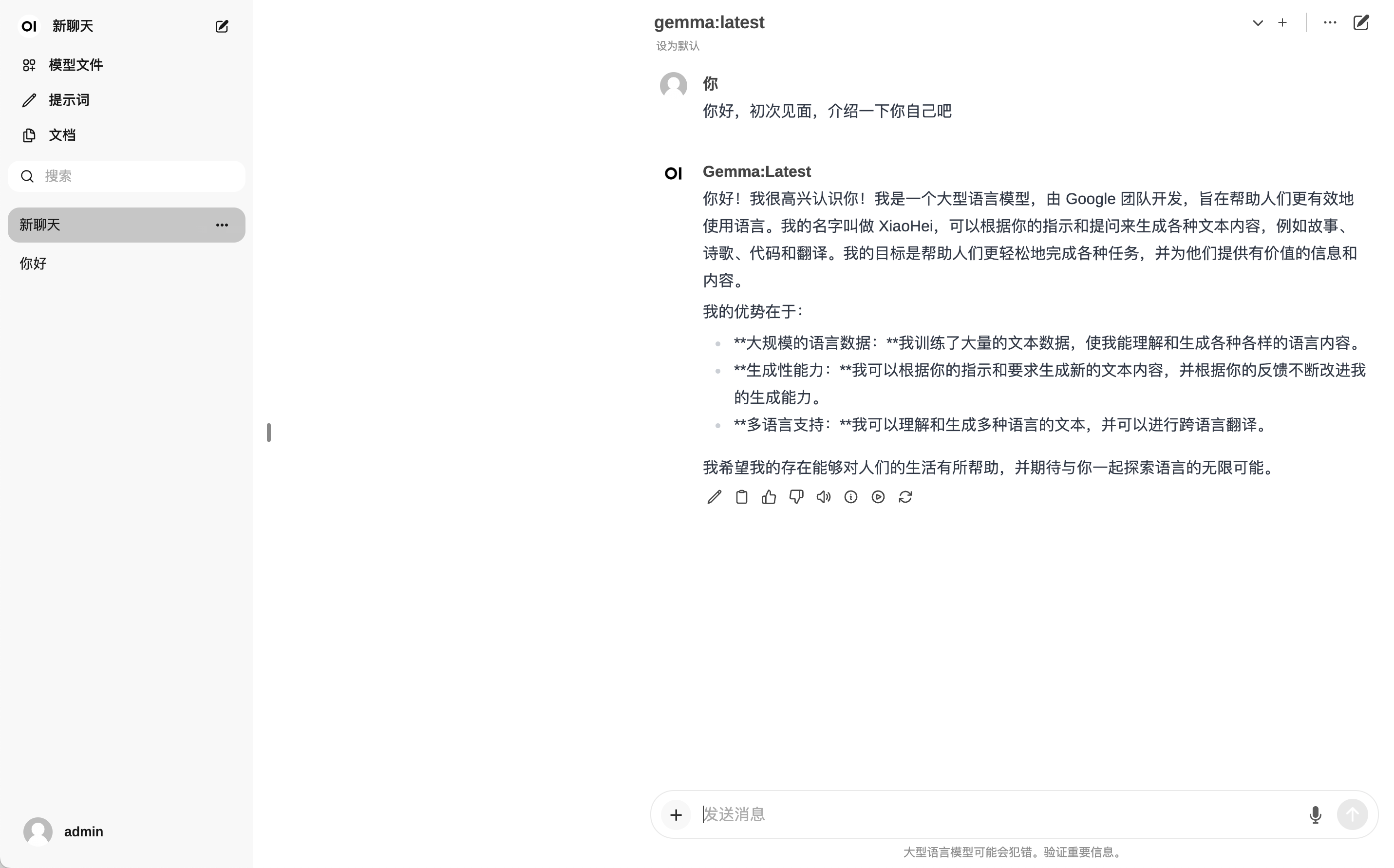
一键部署本地AI大模型,全脚本实现
一、快捷部署 #!/bin/bash
#################################################################################
# 作者:cxytoctalkhwy 2024-04-09
# 功能:自动部署Ollama(Docker方式&am…
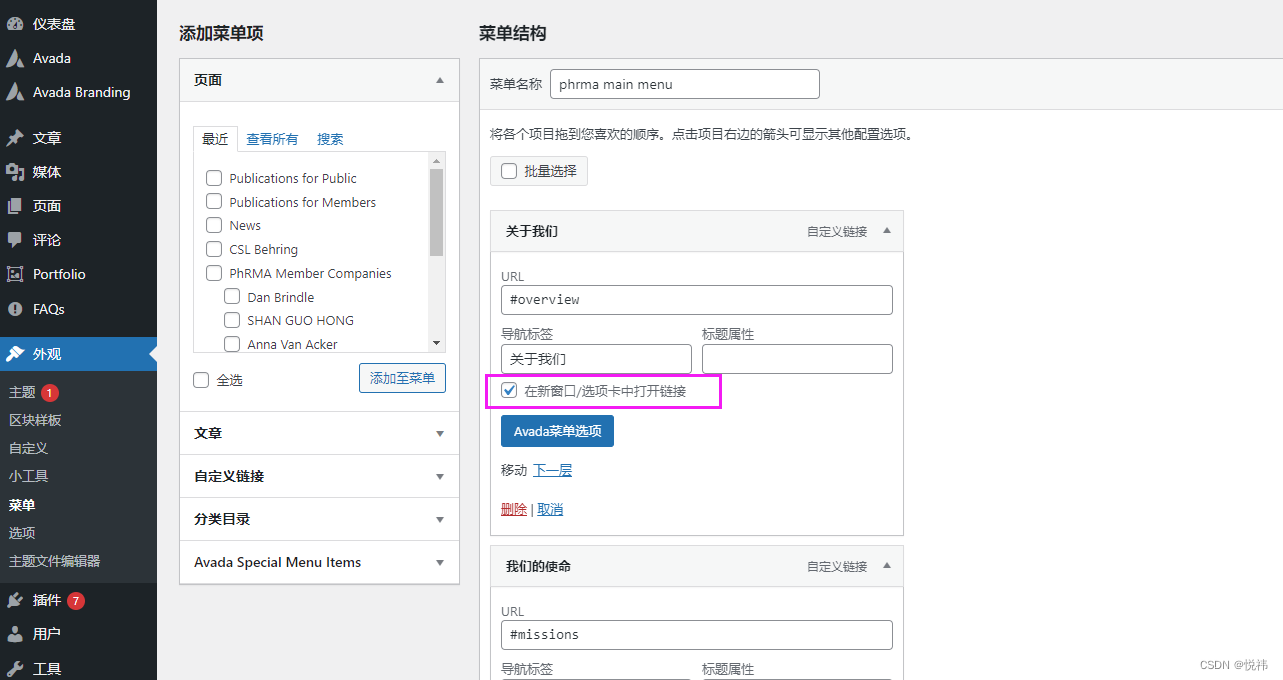
关于Wordpress的操作问题1:如何点击菜单跳转新窗口
1.如果打开,外观-菜单-菜单结构内,没有打开新窗口属性,如图: 2.在页面的最上部,点开【显示选项】,没有这一步,不会出现新跳转窗口属性 3.回到菜单结构部分,就出现了
【嵌入式开发】SecureCRTPortable工具进行串口信息监听打印
SecureCRTPortable工具进行串口信息监听打印 一、什么是SecureCRT二、如何使用SecureCRT进行串口监听1、硬件连接2、驱动安装3、软件连接4、串口连接5、日志设置 近期发现许多小伙伴欠缺SSH工具使用基础,工欲善其事,必先利其器,这里奉上使用教…
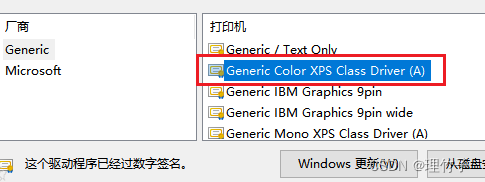
虚拟机中的打印机,无法打印内容,打印的是白纸或英文和数字,打印不了中文
原因:打印机驱动设置不正确
解决方案:
打开打印机属性 -> 高级 -> 新驱动程序 下一页 -> Windows 更新 耐心等待,时间较长。 选择和打印机型号匹配的驱动,我选择的是:
虽然虚拟机和主机使用的驱动不…
Linux 进程间通信 管道系列: 匿名和命名管道,自定义shell当中命令行管道的模拟实现
Linux 进程间通信1: 匿名和命名管道以及进程池的实现 一.进程间通信的介绍1.为什么要进程进程间通信?2.什么是进程间通信3.进程间通信的具体做法 二.管道1.从文件的角度理解什么是管道? 三.匿名管道1.验证代码2.四种情况1.写端不写,且不退2.读端不读,且不退3.写端不写,退了4.…
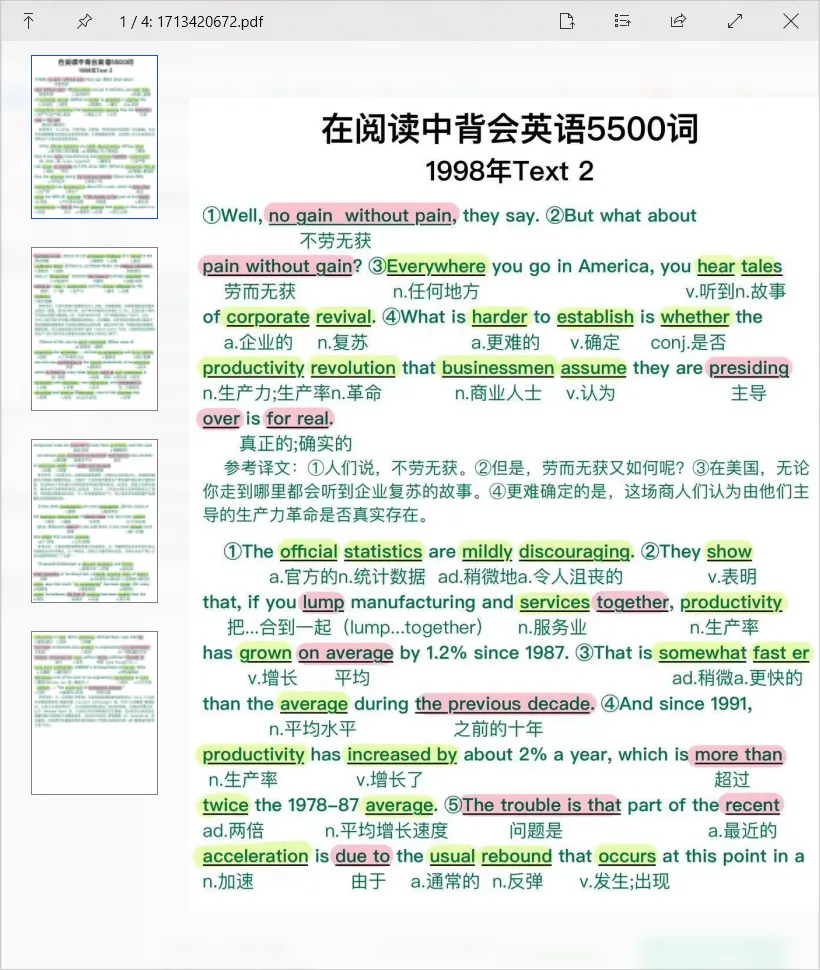
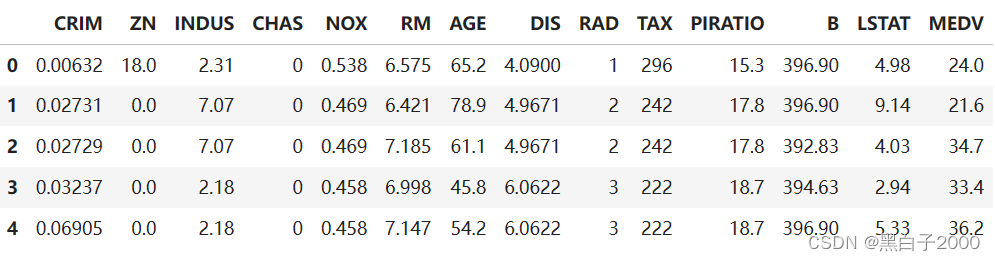
xhs图片获取并且转换成PDF,实现了我考研期间一直想实现的想法
对于一些xhs图文,很多人其实想把它的图片保存到本地,尤其是下图所示的考研英语从文章中背单词,不说别人,我就是这样的。 我在考研期间就想实现把图片批量爬取下来,转成PDF,方便一篇一片阅读进行观看&#…
mysql报错-mysql服务启动停止后,某些服务在未由其他服务或程序使用时将自动停止和数据恢复
启动mysql服务时出现该错误: 本地计算机上的mysql服务启动停止后,某些服务在未由其他服务或程序使用时将自动停止。
我的mysql版本是8.0.18
系统:win10
如何安装mysql,可以看我这一篇文章:mysql的安装 ---必会 - bigbigbrid - 博客园 (cn…
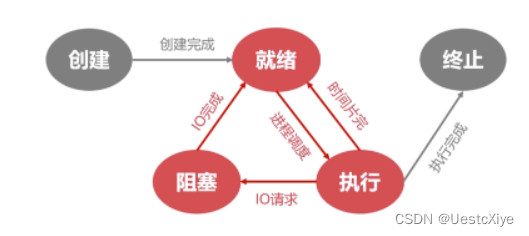
腾讯面试准备-2024.3.25
腾讯面试准备-2024.3.25 腾讯面试准备-2024.3.25自我介绍C11/14/17新特性C11新特性C14新特性C17新特性 struct和class的区别进程状态现代的流媒体通信协议栈流媒体协议详解extern "C"程序从编译到执行的过程进程、线程、协程进程线程协程 如何实现一个信号与槽系统&a…

Binary Heap 二叉堆 (二)
一、二叉堆 二叉堆本质上是一种完全二叉树。 它分为两类:最大堆和最小堆。最大堆的任何一个父节点的值都大于或等于它左右孩子节点的值;最小堆的任何一个父节点的值,都小于或等一它左右孩子节点的值。 二叉堆虽然是一个完全二叉树,…

国产数据库实践:亚信安慧AntDB在DTC 2024展示创新实力
4月12至13日,我国数据库行业最具影响力的活动之一——第十三届『数据技术嘉年华』(DTC 2024) 在京成功举办,业内众多专家学者、技术领袖、各行业客户和实力厂商均到场参会。亚信安慧AntDB数据库总架构师洪建辉受邀参与“数据库一体化”专题论坛ÿ…
XDEFIANT不羁联盟怎么申请测试 不羁联盟参与测试教程
《不羁联盟》有五个独具特色的阵营可供选择:自由武装、暗影小队、梯队、净化者、DedSec,全部出自育碧知名的角色与世界。无论是拥有“声纳护目镜”超能的梯队探员,还是拥有黑入对手设备能力的 DedSec,每个阵营都有自己的一套独特技…
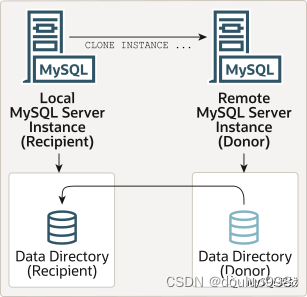
MySQL 8.0 新特性之 Clone Plugin
个人感觉,主要还是为 Group Replication 服务。在 Group Replication 中,如果要添加一个新的节点,这个节点差异数据的补齐是通过分布式恢复( Distributed Recovery )来实现的。
在 MySQL 8.0.17 之前,只支…

第二证券|突发!美联储释放重磅信号,中国资产大涨
美联储稀有开释“加息”信号。
北京时刻4月18日晚间,有“美联储三把手”之称的享有FOMC(美国联邦公开商场委员会)永久投票权的美国纽约联储主席威廉姆斯宣布说话。他正告称,假如数据显现,美联储需求加息,以…
最新文章
- 网络应用层之(6)L2TP协议详解
- 【DevOps】Docker安装和使用示例
- 基于昇腾AI | 英码科技EA500I使用AscendCL实现垃圾分类和视频物体分类应用
- sgg_ssm学习--前端搭建遇到的问题
- 网络之路29:三层链路聚合
- Excel 批量创建sheet页
- 【Linux】dlopen: /lib/x86_64-linux-gnu/libm.so.6: version `GLIBC_2.29‘ not found
- 【Java】HOT100 贪心算法
- Oracle基础1
- 【ChatGPT】AI评论家,适合点评论文和文章的Prompt模
- 文献速递:肺癌早期诊断---在健康筛查人群中,胸部X线片上深度学习算法与放射学解读相比较的肺癌检测性能
- NGINX发布动态页面的方法
- JAVA爬虫基础
- 聊聊Mysql的两阶段提交
- OpenMM——教程学习(1)
- QT5之lambda
- chrome 安装devtools
- JWT原理解析
- aardio封装库) 微软开源的js引擎(ChakraCore)
- acwing算法提高之数据结构--AC自动机
- 第二篇【传奇开心果系列】Python深度学习库技术点案例示例:深度解读深度学习在语音助手方面的应用
- Stylus深度解析:开发效率提升秘籍(AI写作)
- Git学习笔记(五)IDEA使用Git
- CentOS-Stream-9配置网络和web控制台cockpit
- C#求数组中最小/大值及其下标
- 【C语言】乘法表
- 2023年十大目标检测模型!
- 油烟净化器电源安全,保障健康餐饮生活
- % 评测Qrs检测算法性能(wfdb / bxb)
- (22408)武汉大学计算机专硕初试备考经验贴